IMU简述
所谓IMU(Inertial Measurement Unit)是指惯性测量单元,利用惯性的变化测量物体加速运动和旋转。其中目前主流的惯性测量器件是MEMS(微机电)传感器,它将用于机械结构缩小至纳米尺度,可测量机器人加速度与旋转角速度。后面讨论的内容应该可以归为捷联式惯导系统(Strapdown Inertial Navigation System),即测量单元直接安装于被测物体上,与平台式惯导系统区别开来。
需要注意的是,IMU或者说六轴(6Dof)传感器讨论的是三轴加速度计和三轴角速度计(俗称陀螺仪),与AHRS(航姿参考系)或者说9轴(9Dof)传感器是有区别的,后者增加了磁力计,以地磁场作为参考。但是在地面机器人运动并且夹杂大量电机磁干扰的情况下,引入微弱的地磁作为绝对航向并不是一个好主意。
原理
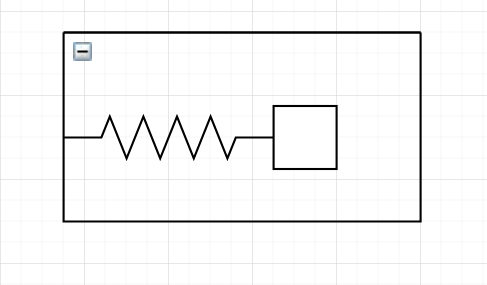
当物体运动的惯性改变时,根据牛顿第二定律实际上物体内部会有相对的作用力,我们可以想象一个加速度计的结构如上图,在整个系统加速或减速时弹簧会有不同程度的伸长或压缩,通过测量弹簧的所连接的物体的位移可以测量出实际加速度的大小,当然这其中也包含重力加速度。在目前MEMS工艺制造的传感器中这些结构都被缩得非常小,以至于测量的位置可以视为被缩在同一点上。
而角速度计的原理类似,但是测量原理是令质量块不断在轴的径向上产生移动,探测其切向偏移测量科氏力大小,从而推出角速度的大小。
性能
通常情况下,这两种传感器都有一般传感器所拥有的性能指标,例如不论是机械制造的误差还是A/D采样带来的偏置,满刻度误差,以及采样数据的噪声还有抗震性能,当然这些也会受到温度和输入电压的影响。有些误差的校正会在后续的校准中提到。
IMU参数
作为一种电子元器件,基本的参数都可以在其数据手册(datasheet)中查到,这些参数说明了IMU的性能范围,可以为选型提供参考,这里列举一些常用的参数
- 量程和灵敏度(sensitivity):代表最大角速度或加速度范围和取样精度,通常有数字接口的IMU都会有这项
- 敏感度温漂(sensitivity change over temperature/ sensitivity temperature drift):敏感度随温度的改变,通常用百分比或者FS/K(满刻度每度)
- 零偏(zero-rate offset/level):IMU中尤其针对角速度计的一个重要参数,它代表了角速度计/加速计在静止时仍然输出的大小,是后续IMU校准中重点讨论的参数。我们希望它越小越好,以避免积分时带来的累计误差。通常目前IMU给出的典型值都是在1deg/s以上。
- 温度漂移(zero-rate offset change over temperature):零偏随温度改变的大小,同样是角速度计的重要参数,越小代表IMU的零偏随温度影响越小。
- 噪声系数(noise):代表输出噪声与带宽的关系,单位一般为(ug/√Hz或者dps/√Hz),直观的说就是影响对真实信号的辨识程度。
- 交叉轴敏感度(cross-axis sensitivity):通常情况下三个轴的输出应该都是独立的,但实际上可能出现跨轴影响输出的现象,这个参数就是用于衡量各轴之间的影响程度
- 加速度敏感度(g-sensitivity):角速度计特有的参数,用于衡量加速度对角速度计输出的影响大小,通常单位为dps/g
- 零偏不稳定性:主要针对角速度计的参数,代表零偏在较长时间下的随机游走
IMU选型
目前可以找到的IMU厂商有以下几个:
- TDK InvenSense:MEMS加速度计,角速度计,磁力计,六轴/九轴厂商,有广泛使用的IMU MPU6050,价位中等(也有更贵的高性能的ICM系列)
- ST(意法半导体):MEMS加速度计,角速度计以及六轴厂商,主要为智能手机市场提供IMU,例如有LSM6DS3TR,价位偏低
- Bosch(博世):MEMS加速度计,角速度计,磁力计,六轴/九轴厂商,主要为机器人和无人机市场提供IMU,六轴传感器的有BMI系列,价位偏高
- ADI:老牌半导体公司,有加速度计和六轴,主要用于汽车和军事领域,性能最高但价位也是极高。当然也有低端的加速计ADXL35x系列
- QST(上海矽睿):磁力计,加速度计以及六轴的国产厂商,有QMI8658/QMI8610等六轴传感器
选型过程自然要比较性能,当然主要看零偏,温漂以及噪声。考虑到价格因素,ADI的六轴这个选项基本可以舍弃。高性能的一档有ICM4x6xx,BMI0xx,QMI86xx和LSM6Dx的性能略逊一筹。
截止目前,已知官方有库存的只有ST和QST。在疫情的背景下,选用国产的IMU或许更能确保稳定供应。