基本概念
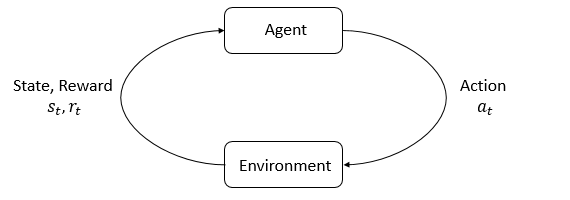
强化学习是指机器通过与外部环境交互,学习最佳策略的过程。其中决策的主体被称为智能体(Agent),它能够根据环境反馈的状态(State),以及人为设计的描述输出动作好坏程度的奖励(Reward)做出相应的动作(Action)。这个过程的“最佳”体现在最终的目标是调整策略,使得总体奖励最大化。
- 状态(State):
时刻的状态记为 ,所有可能的状态取值组成的空间称为状态空间(State Space) - 动作(Action):
时刻的动作记为 ,所有可能的动作取值组成的空间称为动作空间(Action Space)。输出的动作可分为随机性动作和确定性动作。随机性动作由随机策略(Stochastic Policies)产生,输出的动作服从某个可参数化的关于状态的分布即 。确定性的动作由确定性策略(Deterministic Policies)产生,输出的动作可以描述为一个参数化的关于状态的函数 - 奖励(回报,Reward):
时刻的奖励记为 ,可由一个关于状态(或者状态和动作)的函数获得。 - 轨迹:由各个时刻的
组成的序列,记为 - 总体奖励
:描述一条轨迹中的总奖励,一种描述为限无衰减的总回报(finite-horizon undiscounted return)
另一种无限有衰减的总回报(infinite-horizon discounted return)如下,其中\gamma为0到1之间的衰减系数。 - 价值函数(Value Function)
,即从状态 开始,按照策略 输出动作的条件下奖励的数学期望 - 动作-价值函数(Action-Value Function)
,即从状态 开始并输出动作 ,随后按照策略 输出动作的条件下奖励的数学期望
这里的状态(State),动作(Action),奖励(Reward)等变量是对真实系统中的变量的抽象。例如在倒立摆的控制问题中,状态是摆杆的角度、角速度、位移以及速度等参量,而动作则是输出到摆杆底端的水平方向驱动力的大小,奖励可能被人为设计为关于摆杆角度和保持直立的时间长短,摆杆的角度越小并且保持直立的时间越长奖励的值越大。
对于随机策略
则强化学习中学习随机策略的优化目标可以认为是找到一个参数
算法分类
策略梯度(Policy Gradients)
策略梯度方法的基本思想是根据奖励大小直接优化策略,简单而言就是能增加能获得奖励的输出,减小不获得奖励或奖励为负的策略输出。这里优化策略本身的方法也是基于梯度的方法(如梯度下降/上升法优化)。按照上面提到的随机策略的优化目标,待优化函数
这里将梯度转换为对数形式,能将
上述策略梯度可以通过采样不同轨迹
策略梯度方法实际上有许多改进与变种,其形式都是将上述梯度表达式中
- 忽略当前动作以前的奖励,即
替换为 ,避免轨迹中过去的奖励影响未来决策 - 增加基线,即
替换为 ,其中 为当前状态下随机策略的基准值。这样可以将某些奖励输出总是为正的情况变为有正有负,增加对策略的“惩罚” - 动作-价值函数(Action-Value Function)
,这个实际上结合了下面即将提到的基于价值评估的方法。 - 优势函数(Advantage Functions)
,这个函数用于衡量该状态下做出某个动作相对于平均水平的好坏。
策略梯度方法的优势在于对策略的直接改进,基于真实轨迹的采样能够保证最终学习出的策略较为准确。但训练过程可能出现不稳定且方差较大,可通过Importance Sampling,以及TRPO和PPO等训练算法上的改进克服。
价值估计
价值估计方法通过拟合动作-价值函数
贝尔曼方程的基本思想是当前的奖励,加上未来转换到的状态的带衰减的价值函数,即为当前的价值函数。贝尔曼方程告诉我们,如果
基于上式通过统计采样的方法近似数学期望,可以得到
价值估计方法在实际中除了对
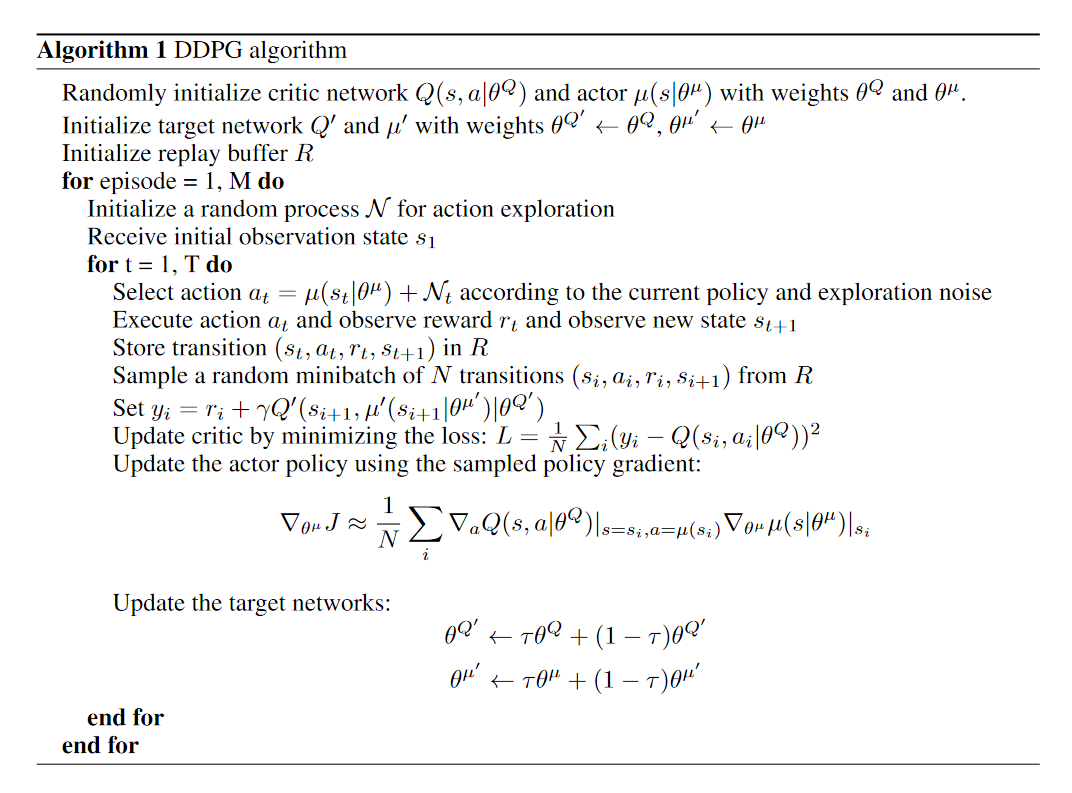
Actor-Critic架构
基于Actor-Critic架构的方法结合了策略梯度和价值估计两种方法,既对价值函数进行拟合,又基于拟合的价值函数求策略梯度改进策略。Actor-Critic架构一般包括策略网络(Actor)和价值网络(Critic)两部分,前者用于输出动作,后者则是对当前价值函数进行估计。一个例子是Deep Deterministic Policy Gradient(DDPG),它同时结合了策略梯度和深度Q网络(DQN),用最小二乘拟合