原理
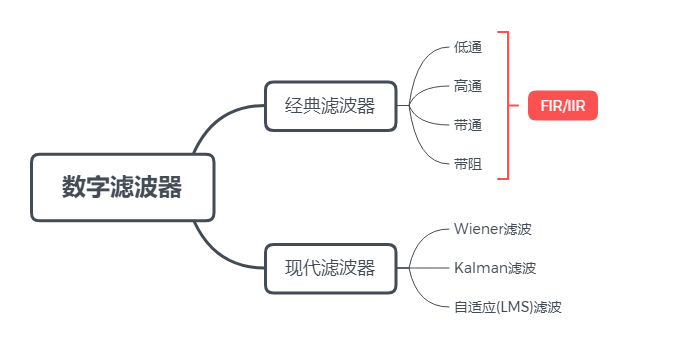
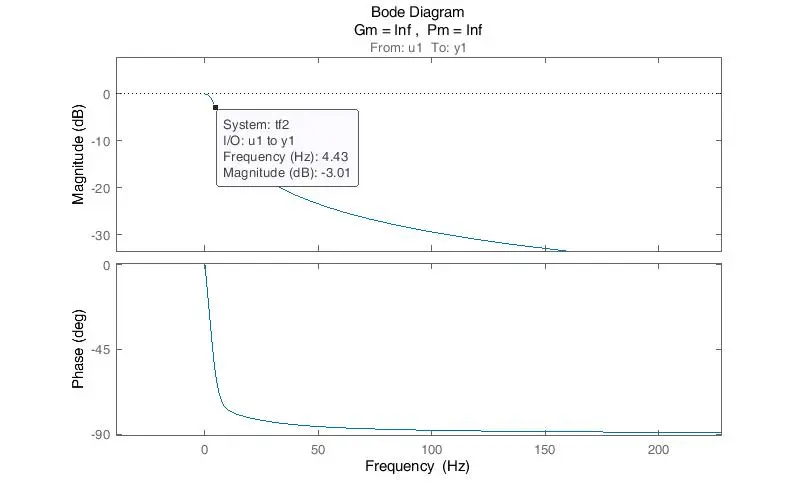
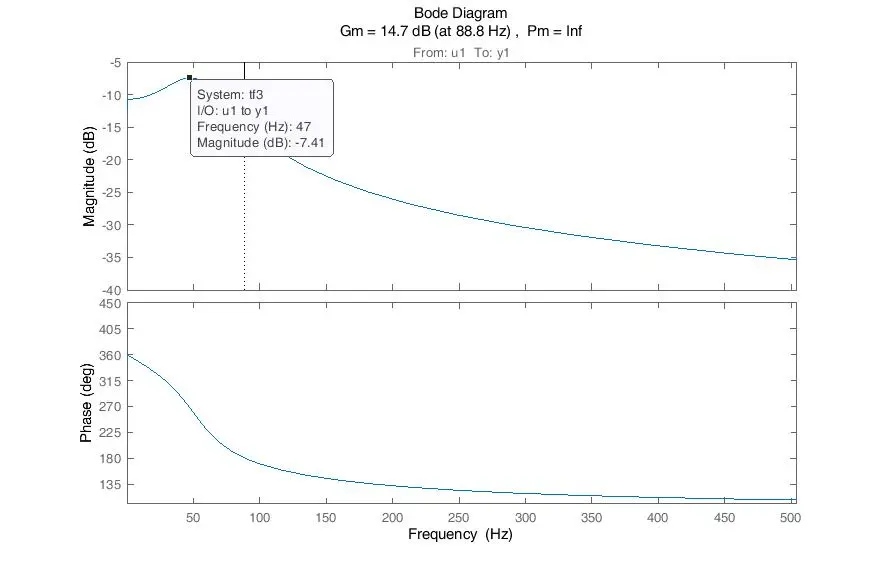
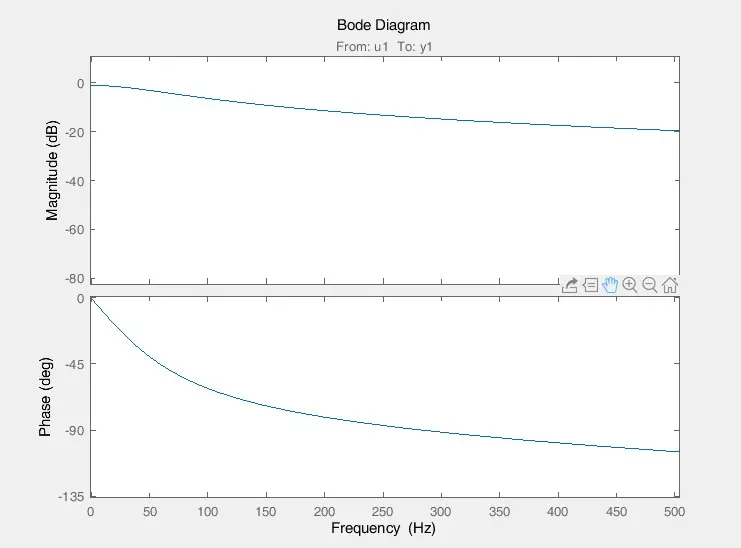
所谓滤波是指再输入信号中提取期望有效的信号,消除不期望的出现的信号即噪声。经典的数字滤波器主要利用信号的频域特性处理噪声,即滤除指定频率分量的滤波器。而现代滤波器利用的是信号的统计特性,即根据某个信号出现的概率进行滤波。这里主要讨论如何设计经典滤波器。
经典滤波器按照结构可以分为IIR(无限冲激响应)和FIR(有限冲激响应)两大类,前者存在输出反馈回路,可以用较低的阶数获得较高的选择性,但是相位是非线性的,并且在设计上存在不稳定的可能,而后者则恰好相反,无输出反馈回路,在同样的选择性下FIR滤波器需要较IIR更高阶数,但其相位是严格线性的并且滤波器总是稳定的。例如在对于控制反馈量的滤波,宜采用FIR确保其输入波形不发生失真。